机器人运动与触觉中的物理学
1. 引言
在现代科幻电影中,智能机器人通常被赋予多种功能,在不同的环境和场景下均表现出了强大的适应能力。在电影《太空旅客》中,男主角在星舰“阿瓦隆号”上孤独地醒来,遇到了一位名叫亚瑟的仿生机器人。亚瑟在陪伴男主角的同时,展现了其出色的操作能力,例如精准地擦拭易碎的酒杯。这种机器人智能化行为背后的技术复杂性,令人们对未来的仿生机器人充满了期待和好奇。如果我们来设计亚瑟这样的机器人,如何让他在擦杯子的时候既能擦的干净,又不会因为用力过大而把酒杯弄碎呢?

想清楚这个问题并不难,因为仿生机器人设计的核心之一是模仿人类的感知与行动方式。人类之所以能够在日常生活中完成各种精细的动作,如擦拭玻璃杯、轻轻抓握水果等,主要依赖于皮肤的触觉感知系统。皮肤通过机械感受器感知外界施加的力,并将这些触觉信号转化为神经冲动,最终由大脑解读和处理。这一复杂的生物过程,使得我们能够在不损坏物体的情况下,灵活地调节手部的力量。机器人要想实现类似的功能,必须拥有能够模拟人类触觉的传感系统。这不仅要求机器人能够感知外界的力量变化,还要能够实时调节机械手的动作力度,以适应不同的任务需求。这一需求促使科学家们开发出多种触觉传感器,以帮助机器人更好地理解和应对外界环境。

QA: 你还知道哪些电影里有仿生机器人?他们有用到触觉吗?
2. 触觉背后的物理学原理
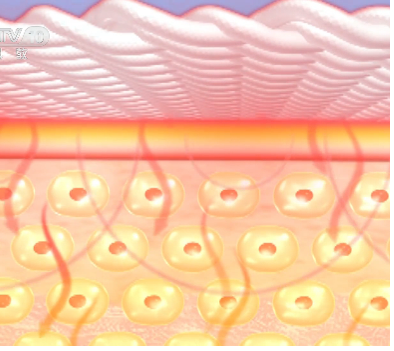
触觉的感知过程本质上是外界力与物体形变之间的物理反应。通过按压或触碰,皮肤或材料表面发生形变,内部的传感器或神经元感受到这一形变,并将其转化为可以解读的信号。在物理学中,这一过程可以通过胡克定律来描述。胡克定律表明,弹性体所受到的力与其形变成正比,即 $$F= kx$$ 其中 $F$ 表示力, $x$ 表示形变, $k$ 为材料的弹性系数。这个公式简单而又强大,它我们理解触觉感知提供了理论基础。事实上皮肤的形变可以粗略理解为皮肤内部有无数的弹簧相互作用。通过借助形变和力之间的关系,科学家们开发了触觉传感器。
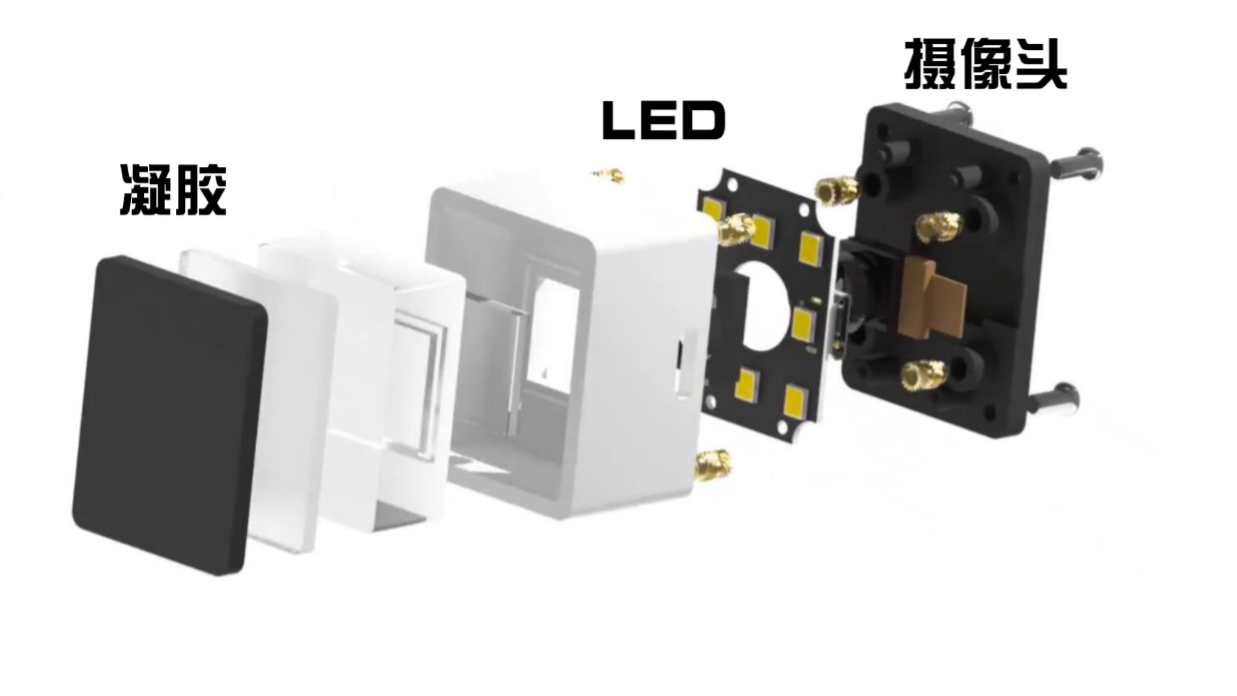
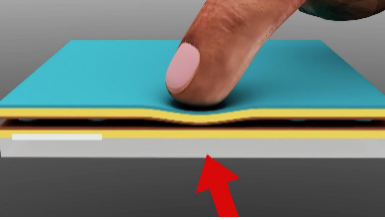
以视触觉传感器GelSight为例,GelSight的构造如其名称所示, “Gel”指的是传感器内部的凝胶材料,而“Sight”则代表其背后的摄像头。GelSight传感器通过在不同LED光源的照射下,使用摄像头捕捉凝胶表面的形变,从而感知接触凝胶的物体形状和凝胶受力反馈。
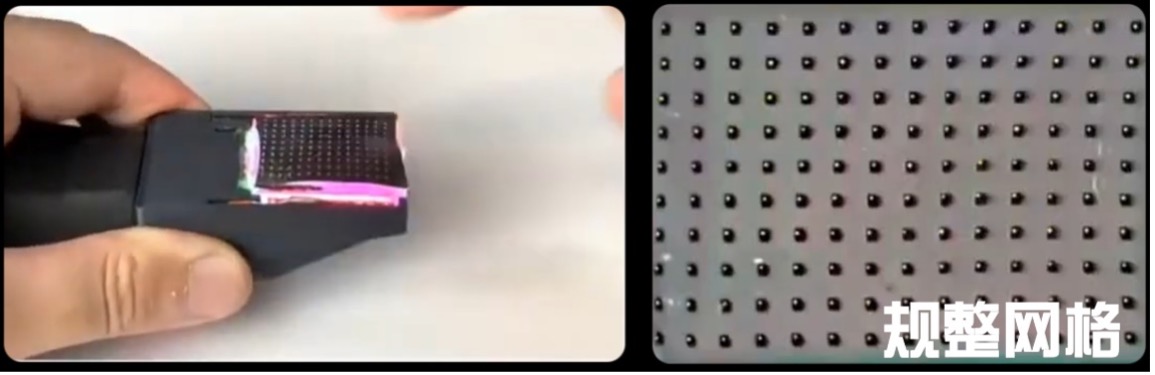
GelSight的操作十分简便。首先记录未按压凝胶时的图像,然后再记录按压后的图像。最初,凝胶上的网格是均匀且规则的;当受到按压后,网格由于形变变得不均匀。通过分析这些网格图案的变化,可以计算出形变量。根据压力与形变之间的关系,能够进一步获取力学分布。最后,将这些数据可视化后,便可以直观地呈现触觉传感器受压后的效果。这一过程不仅简洁明了,还展现了触觉传感器在力学测量中的应用潜力,使得机器人能够像人类一样感知和调整自身的动作力度。
QA: GelSight传感器是模拟皮肤设计的,你还能想到哪些模拟人类感官设计的传感器呢?
3. 生活中的触觉传感器
触觉传感器不仅用于高端的机器人技术,也广泛应用于日常生活中。现代智能设备,如智能手机和平板电脑,普遍采用触摸屏技术,这实际上就是一种大型触觉传感器。当手指触碰屏幕时,屏幕下方的电容传感器能够检测到施加的压力,并将其转换为相应的电子信号,进而实现精准的触控操作。在健身器材中,触觉传感器也扮演着重要角色。例如,体重秤和握力计中的应变电阻,会随着压力的变化而改变其电阻值,从而测量出施加的力。这种基于力学和电学原理的传感技术,已经成为我们生活中不可或缺的一部分。 尽管触觉传感器种类繁多,基于摄像头检测形变的视触觉传感器GelSight由于其高分辨率和灵敏度,仍然是实现精细操作的首选技术。因此,在设计仿生机器人“亚瑟”时,具备高度精确力控制的视触觉传感器必不可少。
QA: 我们触摸手机屏,长按并选择这段文字的时候触摸屏背后用到的是那一类触觉传感器?
4. 触觉下的微观世界
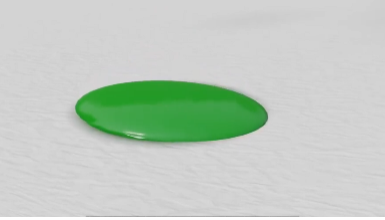
佛说“一花一世界,一叶一菩提”,触觉是我们人类在微观世界的另外一双眼睛。 在日常生活中,我们往往忽视了一些微小的细节,例如打印纸上的文字、纸币上的纹路、甚至是食物表面的纹理。然而,通过触觉传感器的帮助,这些微小的世界变得可感知且可见。以打印纸为例,尽管肉眼看起来表面平整,但触觉传感器能够捕捉到墨点在纸张表面形成的微小凸起。这种细微的形变,揭示了印刷过程中的纸面形状变化,使得我们能够更深入地理解物体表面特性。触觉传感器的这种能力,也使得它在防伪技术中具有重要应用。例如,纸币上的复杂纹路通过触觉传感器可以被精确地检测到,这不仅帮助防止伪造,还能更好地研究纸币的设计细节。
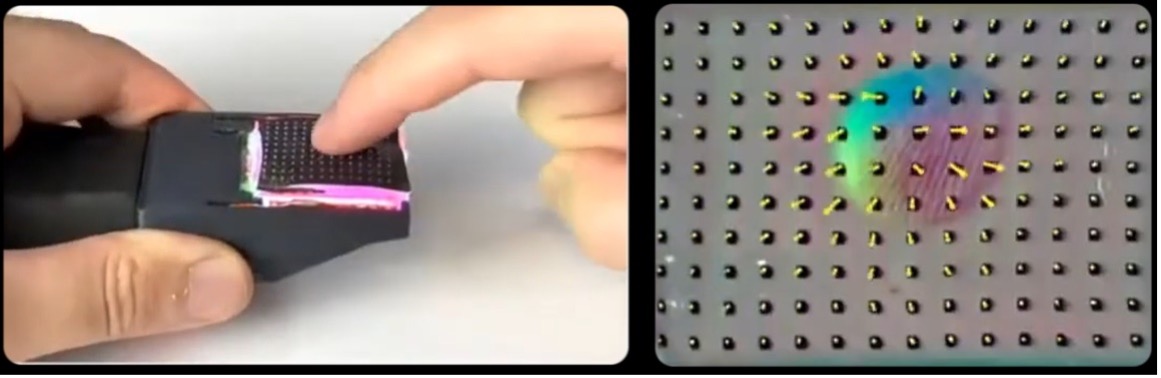
图8-6 视触觉传感器下的打印字符“ink”的微观形状可视化
QA: 了解了触觉传感器下各类物体的形状,你还想知道哪些物体的微观形状细节呢?
5. 触觉赋能机器人精细交互
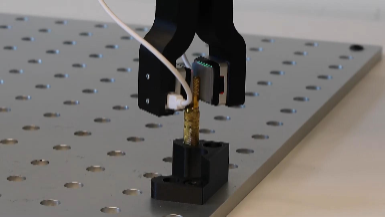
触觉精细的微观感知也让它在机器人的精细交互方面大展身手。举个例子,OpenAI 推出的机器人 Figure 01 受到了广泛关注,Figure 01可以完成各种人类布置的任务,包括煮咖啡、叠衣服等。就像电影《太空旅客》中的仿生机器人亚瑟一样,Figure 01 在操作咖啡机时,需要精确地感知和控制按压咖啡机按钮的力度。这一过程背后依赖于触觉传感器的实时反馈机制:首先,触觉传感器会不断提供按钮所受的压力信息,这个过程即为机器人的感知过程;在感知到外界施加的力之后,Figure 01 的内部系统会对这些数据进行处理,判断当前的力是否适合继续执行动作,这是机器人的决策过程;最终,机器人会根据决策结果调整手部动作,要么继续增加力度,要么减小力度,以确保不会损坏咖啡机,这便是机器人的交互过程。感知、决策、交互这三个过程不断循环,使得 Figure 01 能够与环境进行精细互动,在执行复杂任务时表现得如同人类一般灵活。
这种触觉技术的进步,使得许多科幻电影中的场景逐渐成为现实。例如,在动画电影《机器人总动员》中,观众们见到了机器人为船长提供刮胡子和按摩等日常服务的场景。刮胡子这个任务看似简单,但实际上对力度的控制要求极高。如果机器人不能精确感知刀片与皮肤的接触力,可能会导致皮肤受伤。因此,触觉技术在这个过程中起到了至关重要的作用,它不仅帮助机器人调整力度,还保障了使用过程的安全性。今年,上海交通大学的卢策吾教授在实验中成功让一台机器人“Tony”老师为他刮胡子。这一成果得益于精密的触觉传感技术和具身智能的发展,使得科幻电影中的场景得以在现实中实现。机器人通过触觉反馈,能够感知到刮胡刀与皮肤的微妙接触,确保操作的精准性和安全性。
通过这些案例可以发现,触觉传感器在机器人中的作用非常关键。没有触觉传感器,机器人在执行任务时将缺乏最关键的感知能力。我们再举个例子,当人类插入 USB 接口时,实际上依赖于手指与接口的微小触碰压力来精确调整姿态。如果没有触觉反馈,这样简单的操作也会变得困难重重。因此,触觉被称为“机器人领域最后一厘米的感知”,是实现精细操作和人机交互的关键。
QA: 以上海交大的刮胡子机器人为例,感知、决策、交互分别对应了机器人哪个阶段的操作呢?
6. 触觉技术的未来展望
触觉技术的未来应用不仅限于目前的工业和生活场景,它还将在更广泛的领域内发挥重要作用。例如,在电影《我的机器人女友》中,女主角是一位仿生机器人,她不仅拥有类似人类的外表,还能够品尝食物的美味、感受香水的芳香,并与男主角进行自然流畅的互动。这样的逼真体验依赖于视觉、触觉、嗅觉、听觉等多种感官的协同工作。未来的人工智能系统可能会逐步实现多感官协同,提升与人类互动的真实性和自然性。
此外,对于热爱动漫的朋友来说,《刀剑神域》这部作品应该并不陌生。这是一部基于虚拟现实(VR)技术的动画,其虚拟世界里的景色非常优美。但是现阶段的我们只能通过视觉和听觉来感受这个世界,无法体验到实物触感,如持剑战斗的感觉。未来,如果能够将触觉传感器整合到全身穿戴设备中,实现多感官协同的沉浸式体验,我们便能够在《刀剑神域》的世界中进行冒险,享受一种全新的互动体验。
在《刀剑神域》中,哪些情节用到了触觉?穿戴全身的触觉传感器可能会给人体带来伤害吗?
7. 小结
触觉传感器作为机器人技术中的重要组成部分,正在改变我们对机器人和智能系统的理解。通过深入学习触觉背后的物理学原理,科学家们得以开发出越来越先进的触觉传感器,为机器人赋予了类似人类的精细操作的能力。随着技术的不断发展,触觉传感器将在更多领域内发挥关键作用,推动智能系统的进一步优化,最终让更多的科幻场景成为现实。
思考与互动
- 除了触觉以外,我们还有哪些感官?对应这些感官的传感器有哪些?
- 如果你手头就有一个GelSight触觉传感器,你最希望用它来做些什么?
- 除了Figure 01以外,你还能找到哪些人形机器人?他们的行为符合感知-交互-决策流程吗?
通过本章的学习,希望同学们能够对机器人运动和触觉中的物理学有更深入的理解。同时可以参考 线上视频资源 ,制作属于自己的触觉传感器,去更好的感知和了解这个世界。